Global Emergency Autonomous Response System (GEARS)
Introduction:
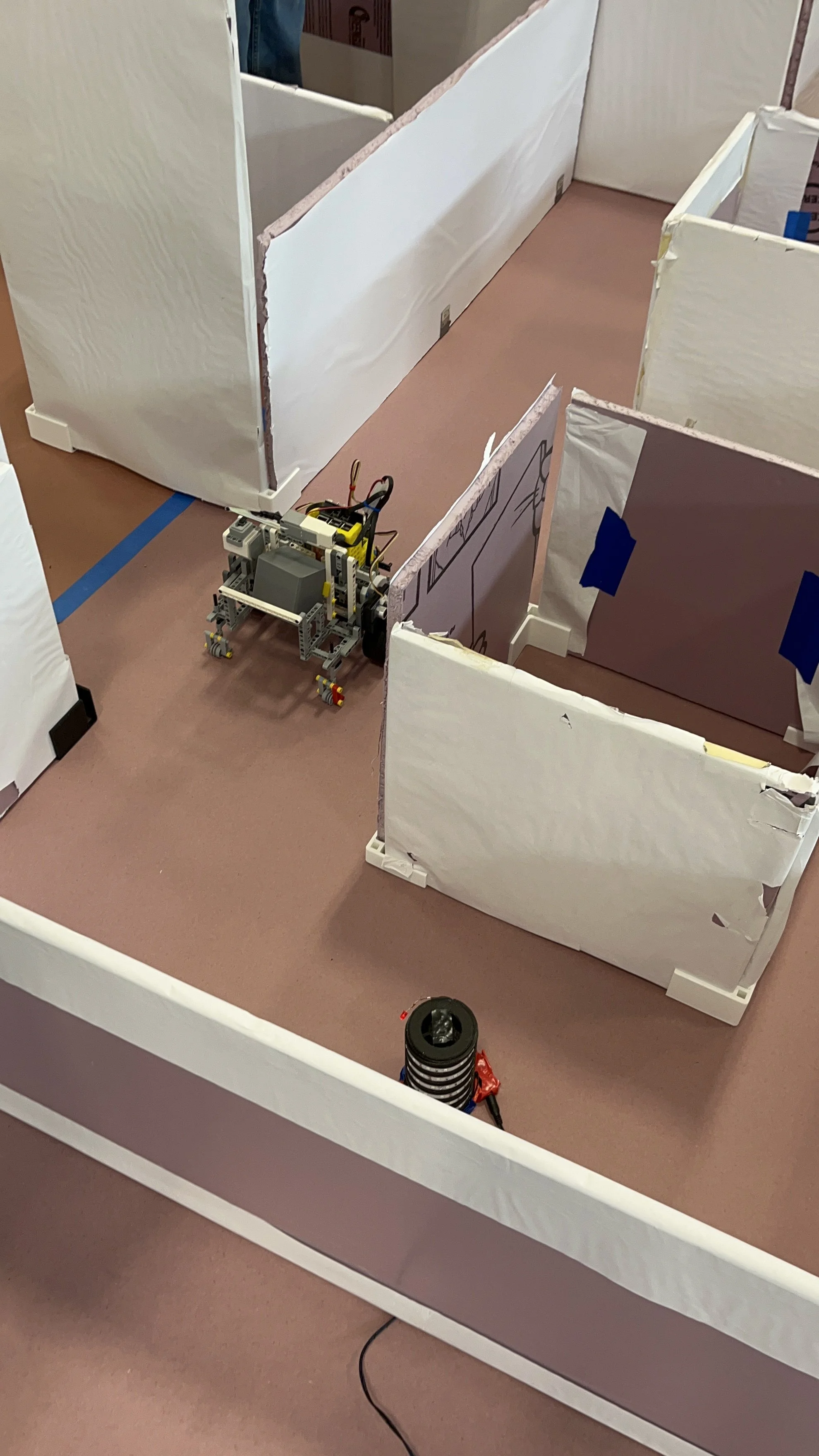
The Global Emergency Autonomous Response System (GEARS) project focused on the design, construction, and testing of an autonomous disaster-relief robot capable of navigating hazardous environments while delivering critical supplies to affected communities. Developed in response to requirements provided by L3Harris, the robot was tasked with autonomously traversing an unknown maze, detecting and avoiding both infrared and magnetic hazards, generating a map of its traveled path, transporting and depositing cargo, and communicating with recipients in a language-and culture-independent manner. The project combined mechanical design, embedded systems, sensor integration, software development, and human-centered design principles to create a functional prototype capable of supporting humanitarian aid operations in disaster-stricken areas.
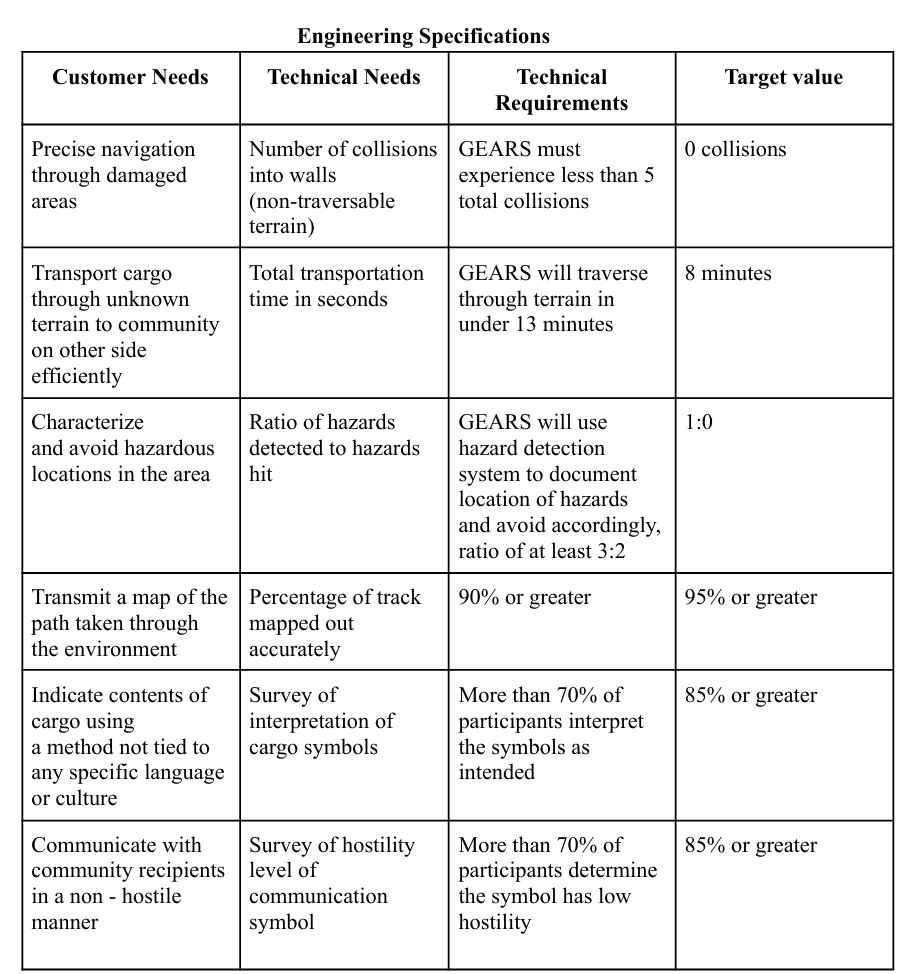
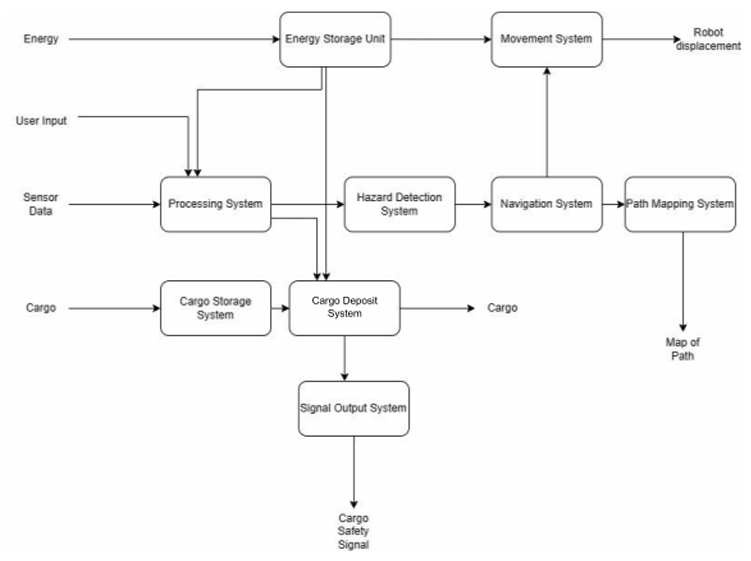
The design process began by identifying the customer needs and forming corresponding technical requirements. These requirements can be found in the engineering specifications table on the right. Additionally, a functional block diagram was created to help identify and lay out the various subsystems that would need to be designed. This diagram is also used to show how the various subsystems will interact with one another.
Design:
Robot Chassis and Mobility System
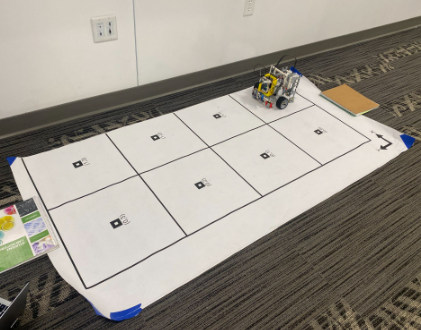
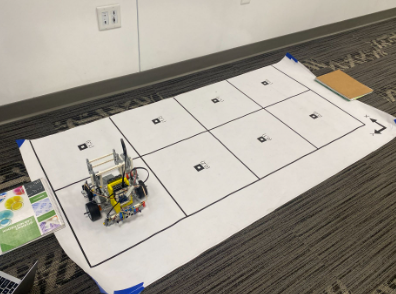
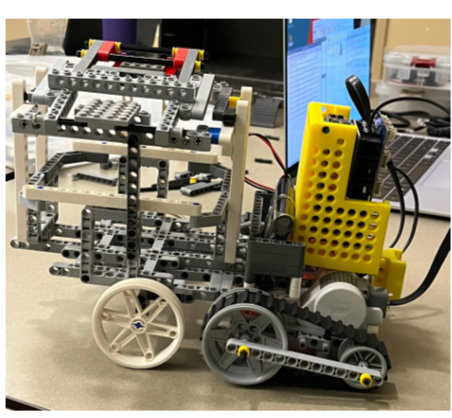
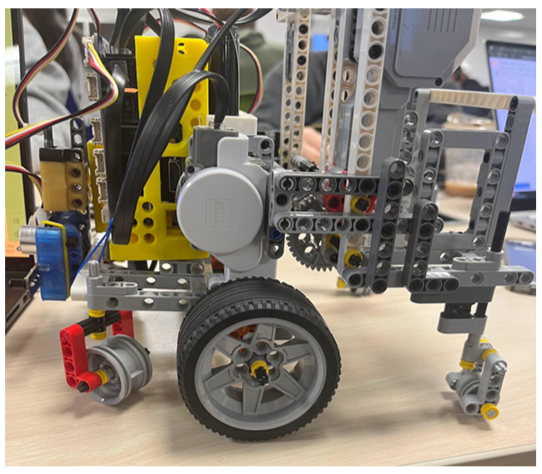
One of the most significant aspects of the robot’s design was its mobility system. Early design iterations utilized a tank-tread configuration, but testing revealed limitations in turning precision and straight-line tracking. To address these shortcomings, the final design adopted a middle-wheel-drive configuration with two powered wheels positioned at the robot’s center and four caster wheels located at the corners of the chassis. This arrangement allowed the robot to perform accurate point turns while maintaining stability during navigation. Additionally, the overall footprint of the robot was reduced to provide greater clearance within the maze corridors, minimizing the likelihood of wall collisions and improving maneuverability in confined environments.
Cargo Delivery Mechanism
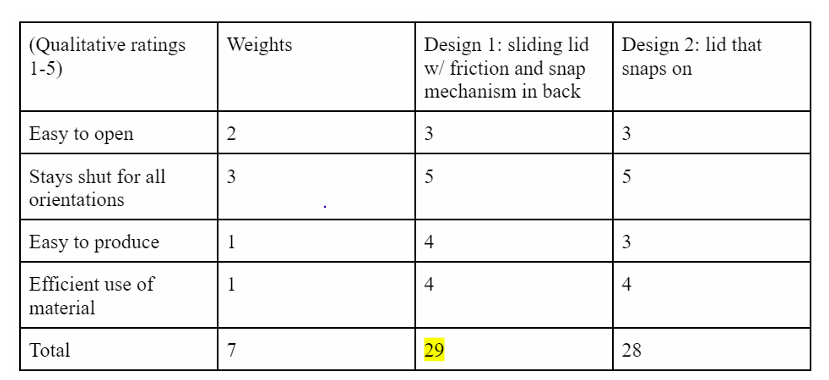
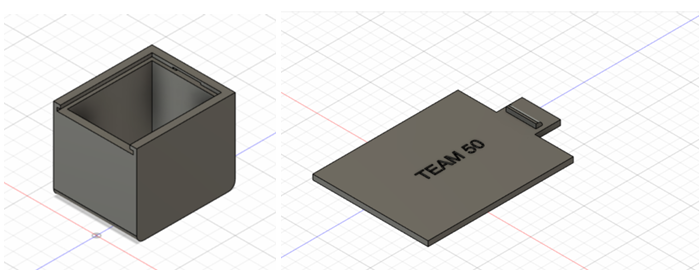
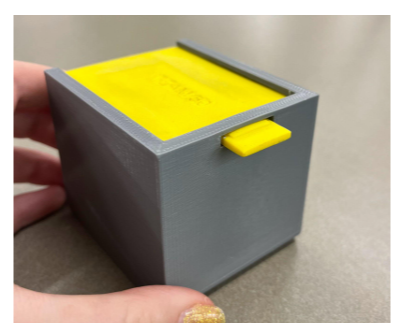
The cargo transportation and deployment system was designed to securely carry relief supplies throughout the mission and deliver them upon reaching the destination. The final design utilized a 3D-printed cargo container with a sliding-lid mechanism selected through a structured design evaluation process. This design was selected using the weighted decision matrix shown on the right.
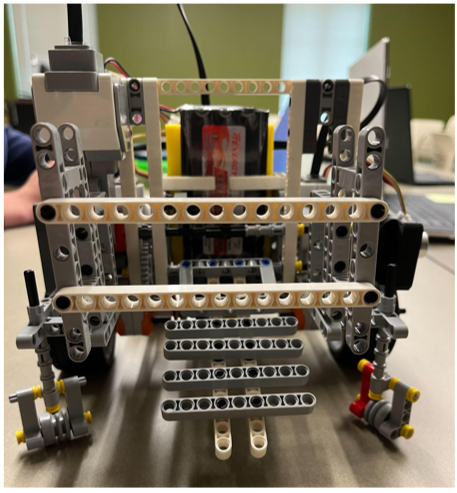
The container was mounted on a trapdoor-style deployment platform positioned at the rear of the robot. Once the robot reached the maze exit, a motor-driven mechanism released the trapdoor, allowing the cargo container to slide out in a controlled manner. Testing showed that the container remained securely closed during transportation while still being easy for recipients to open after delivery. Multiple design revisions improved deployment reliability and ensured smooth operation under a variety of conditions.

Navigation and Sensor Integration
The navigation system was built around a right-wall-following algorithm supported by two ultrasonic distance sensors. One sensor was mounted at the front of the robot and the other on its right side, enabling the robot to determine the presence of walls and make navigation decisions based on surrounding geometry. The right-wall-following strategy was selected because it provides a simple and reliable method for escaping simply connected mazes while minimizing computational complexity. Sensor readings were continuously evaluated to determine whether the robot should proceed forward, turn, or adjust its route. This approach enabled the robot to successfully navigate intersections, corridors, and turns while maintaining awareness of its surroundings.
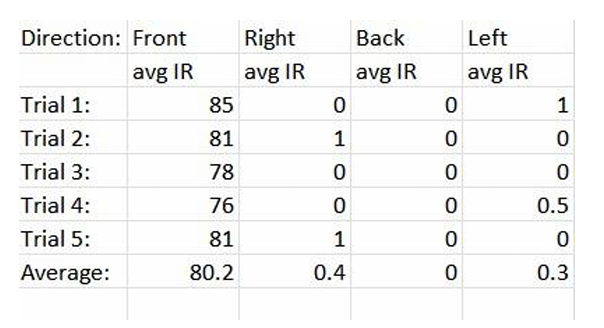
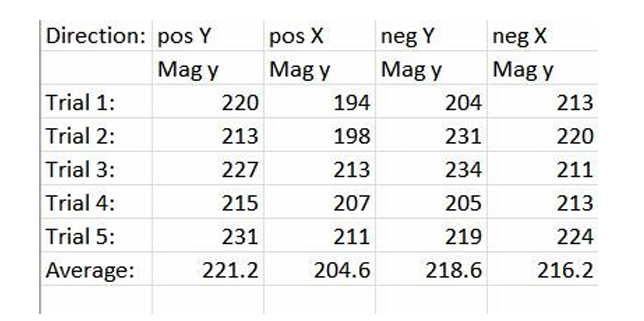
A key mission requirement was the ability to identify and avoid hazardous areas. To accomplish this, the robot incorporated an inertial measurement unit (IMU) for magnetic field detection and an infrared sensor for identifying heat-based hazards. Extensive testing was performed to establish detection thresholds and sensor placement configurations that maximized reliability. When a hazard was detected, the robot would record its location, update its internal map, and select an alternate path to avoid entering restricted zones. The mapping system tracked the robot’s position and orientation throughout the maze using coordinate-based logic, enabling the creation of a digital representation of both the traveled path and detected hazards. This functionality demonstrated the robot’s ability to gather and process environmental information while maintaining mission objectives.
Software Architecture and Autonomous Control
The software architecture integrated navigation, hazard detection, mapping, and cargo deployment into a single autonomous control system. Movement functions were developed using motor encoder feedback and gyroscope measurements rather than time-based commands, significantly improving precision and repeatability. Dedicated software functions controlled forward movement, turning maneuvers, hazard detection, and map generation, reducing code redundancy and improving maintainability. The navigation logic accounted for numerous environmental scenarios, including obstacles, hazards, intersections, and dead ends, allowing the robot to make informed decisions throughout the mission. Through extensive testing and iterative refinement, the software evolved into a robust control system capable of coordinating all major robot functions autonomously.
Cargo Label and Safety Indicator Design
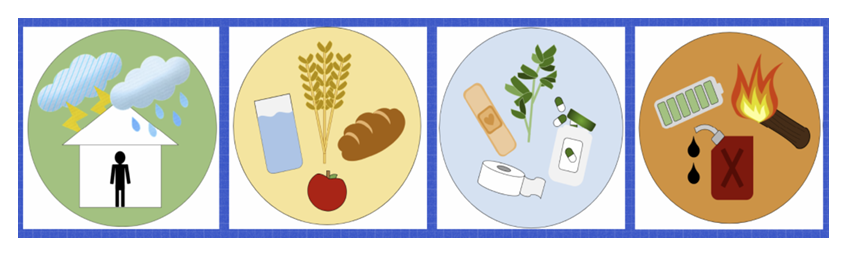
The design process for the cargo labels and safety indicator focused on creating a universally understandable method of communication that was independent of language and culture. Four cargo labels were developed to represent food and water, medical supplies, fuel, and shelter, with each symbol designed using simple visual elements contained within a circular silhouette. To evaluate their effectiveness, surveys were conducted in which participants interpreted the symbols and rated how closely their interpretations matched the intended meanings. The results showed that the food and water and medical supply labels were easily understood, while the fuel and shelter symbols required redesign based on participant feedback. Several iterations were made to improve clarity and reduce misinterpretation. In addition to the cargo labels, a safety indicator was developed to communicate that the robot and its delivered cargo posed no threat to recipients. After researching peace symbols from various cultures, a dove carrying an olive branch was selected due to its widespread association with peace and goodwill. This symbol was displayed on a raised flag deployed after cargo delivery, providing a clear visual indication that the cargo was safe to approach and accept.


Testing and Results:
Testing demonstrated that the GEARS robot successfully achieved many of its intended objectives. The robot consistently performed precise 90-degree turns, accurately followed walls, detected and avoided both infrared and magnetic hazards, and securely transported cargo throughout testing. During the final demonstration, it successfully reached the first checkpoint, correctly identified an infrared hazard, and selected a safe alternative route. While accumulated positioning errors ultimately prevented the robot from completing the entire maze and producing a final map output, preliminary testing repeatedly validated its mapping capabilities, hazard detection systems, cargo deployment mechanism, and safety flag operation. Overall, the project demonstrated the feasibility of an autonomous disaster-relief robot and highlighted both the strengths of the design and opportunities for future improvements in navigation accuracy and path correction.